RESEARCH TOPICS
SENSOR FUSION & SIGNAL PROCESSING
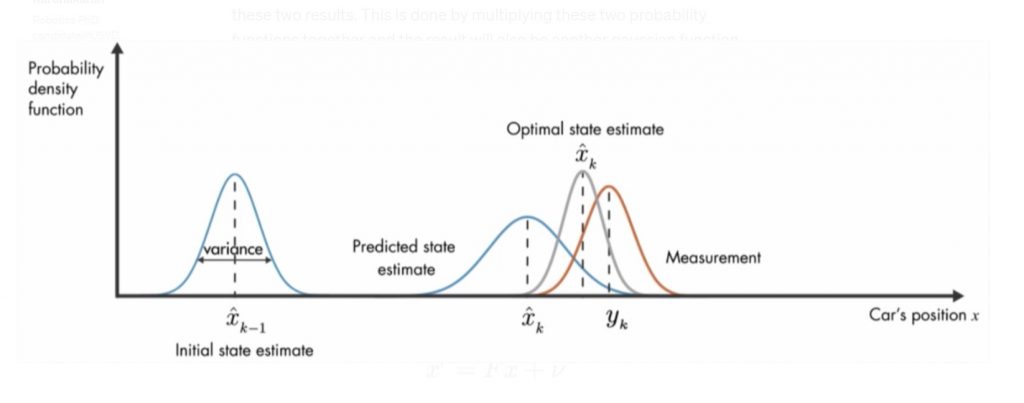
Spectral analysis, sensor calibration, sensor fusion, real time estimation, inertial navigation systems (IMU + GPS + Barometer). In particular, Kalman filtering such as linear, extended, unscented Kalman filters, and particle filter. My Kalman filter based solution to estimate the 3D wind speed using nacelle Lidar is industrialized by Leosphere in 2021.
CONSTRAINED CONTROL
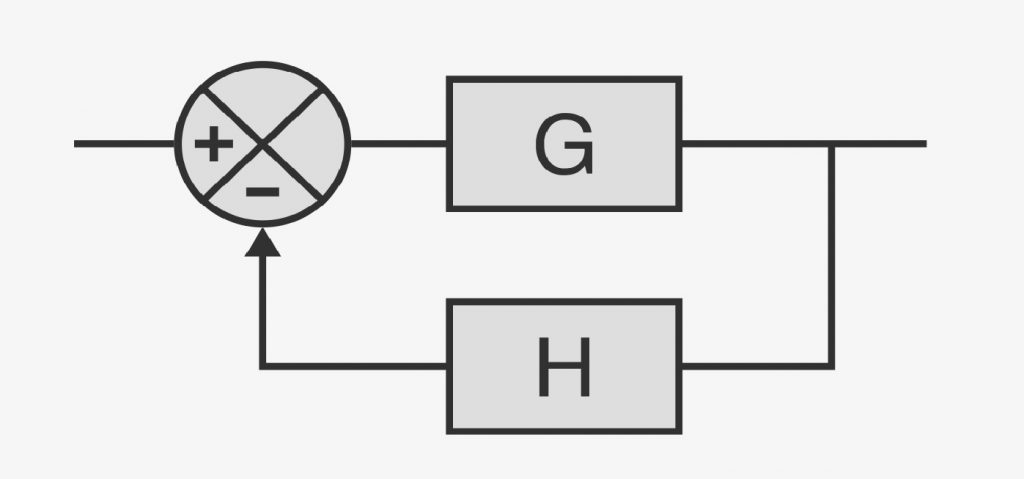
Analysis and design of low computational complexity controllers for uncertain and/or time-varying systems with input and state constraints. In particular, Model Predictive Control (MPC), Interpolating Control, Reference Governor, Uniting High-Gain and Low-Gain Controllers. My MPC solution for wave energy converter won the WECCOMP international competition.
OPTIMIZATION
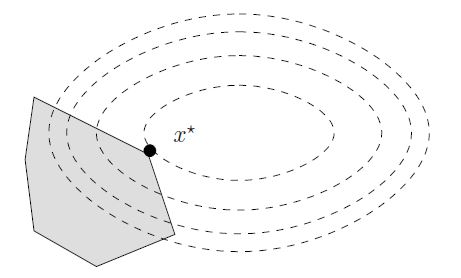
Application of optimization in control and estimation. Black-box Optimization, Convex Optimization, Robust Optimization, Stochastic Optimization. In particular real time QCQP, SOCP with first order methods.
EMBEDDED SYSTEMS
Rapid control prototyping, hardware-in-the-loop simulation, Embedded Coder, microPython, C, C++. In particular Arduino.
PROJECTS
ReTEQCQP
- Period: 2023-2024 (24 months).
- Principal Investigator: Hoai-Nam Nguyen (personal grant).
- Title: « Real time Efficient Quadratically Constrained Quadratic Programming ».
- 80K€ funded by IP Paris.
CeMPC
- Period: 2023-2024 (12 months).
- Principal Investigater: Hoai-Nam Nguyen (personal grant).
- Title: « Computationally Efficient Stochastic Model Predictive Control for Smart Grid Applications ».
- 60K€ funded by E4C.
ReTQCQP
- Period: 2023 (12 months).
- Principal Investigator: Hoai-Nam Nguyen (personal grant).
- Title: « Solveur efficace en temps réel pour l’optimisation quadratique embarquée sous contraintes quadratiques ».
- 50K€ funded by Carnot.